一、方向简介
巡检机器人研究面向园区、厂区、地下管廊、电力设施、交通枢纽、仓储物流及危险作业区域等场景,重点解决复杂环境下机器人的自主巡检与智能运维问题。该方向围绕环境感知、目标识别、自主定位、路径规划、运动控制、多传感器融合与异常检测等关键技术展开,提升机器人对设备状态、环境变化和潜在风险的实时发现能力。研究内容包括基于视觉与激光雷达的地图构建、复杂环境导航避障、设备表计识别、热异常检测、语音交互及远程协同控制等。通过将机器人技术与人工智能、边缘计算和智能运维平台深度融合,可实现巡检流程自动化、风险识别智能化和管理决策数据化,降低人工巡检成本与安全风险,提高重点场所和关键设施的运行保障能力。
二、研究内容与成果
智能巡检机器狗平台与自主感知技术
课题组开展了面向复杂场景的智能巡检机器狗平台研究,围绕移动机器狗本体、多源感知融合、边缘智能计算与远程协同控制等方面持续攻关,构建了具备环境感知、自主导航、状态识别与任务执行能力的巡检机器狗系统。
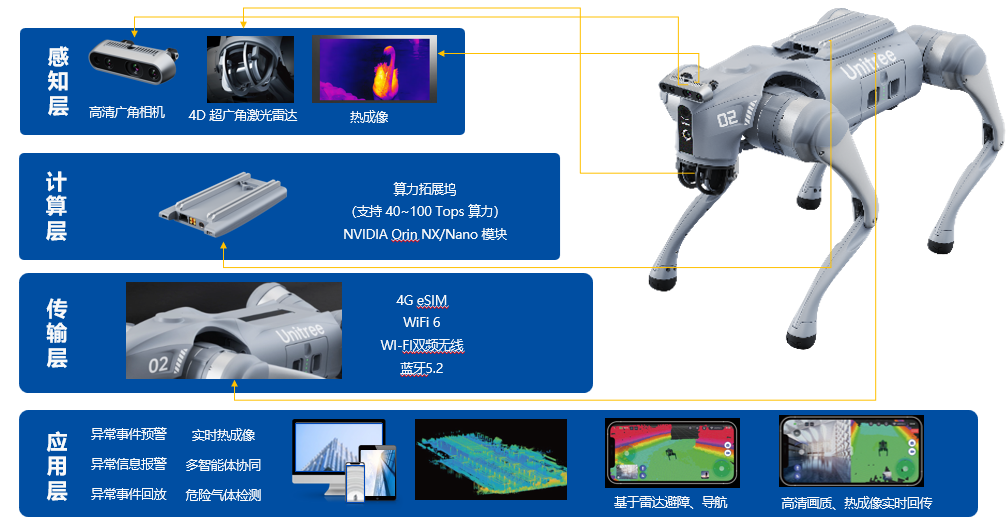
巡检机器狗架构图
在感知层面,形成了融合视觉、激光、热成像等多模态信息的环境理解技术,可满足复杂环境下目标识别、状态监测与异常发现需求。在系统层面,研究了机器人端智能计算与云边协同架构,实现巡检数据实时处理、远程交互和任务管理。相关成果提升了巡检机器人的环境适应能力、运行稳定性与智能化水平,为多行业场景应用奠定了基础。
面向电力场景的数字孪生智能巡检系统
课题组面向大范围、复杂环境巡检需求,开展多智能体巡检系统研究,重点突破多机器人协同感知、任务分配、路径规划、集群控制与协作决策等关键技术,构建了空地协同、异构协同的智能巡检体系。
通过融合地面机器人、无人机及固定感知节点等多类智能体,系统可实现大场景快速覆盖、重点区域精细巡检以及异常事件协同处置,提升巡检效率与任务执行灵活性。围绕动态环境下的信息共享与协同决策问题,课题组形成了多智能体自主协作与群体智能相关研究成果。
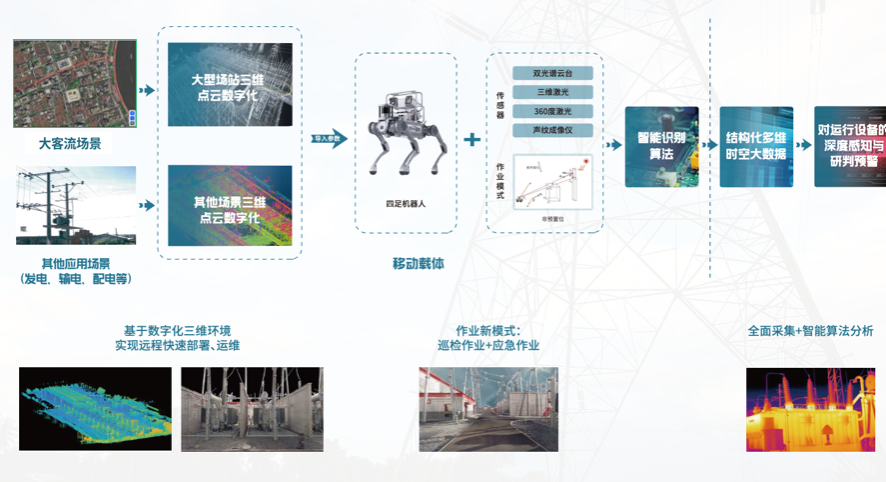
多智能体巡检流程

